The season theme Hydrodynamics was specified as water extraction, water transport, water disposal and water waste. We chose water distribution as the main problem, which was the result of a detailed analysis done not only using the current reality tree, but also by reading professional literature, articles and meeting with experts. Although there are currently several methods and ways of finding the places in the pipes where drinking water leaks, none of the current solutions has been able to ensure a water loss of less than 20% (the difference between the water produced and the water invoiced) in Slovakia.
Pipemarine is the solution
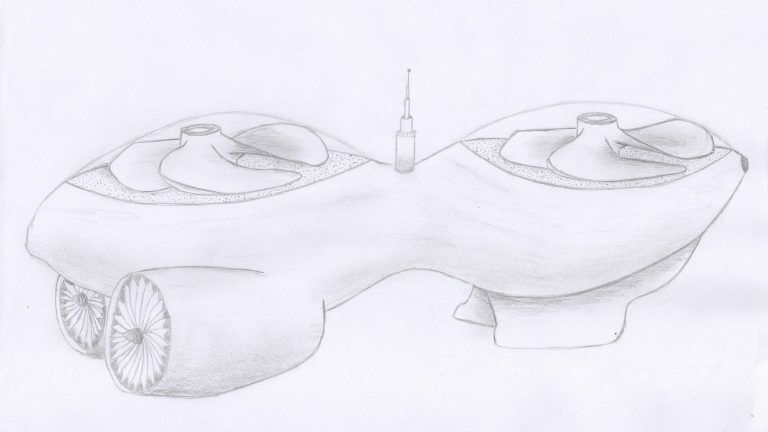
After a detailed study of the problem and existing solutions, we came up with the innovative robotic device called Pipemarine.
Use of Pipemarine
Pipemarine is an analytical tool in the form of an autonomous robot for mapping and monitoring the condition of water pipes. Its task is to analyse and detect deposits, corrosion, mechanical defects (which are very difficult to identify if they point downwards, which consequently causes a large loss of water), inspect the strength and map water pipes.
Sensors on board Pipemarine
The robot is equipped with several sensors. LIDAR, known mainly from autonomous cars, is used for orientation. This sensor is used for orientation, detecting large deviations and creating a 3D model of the pipelines. The accuracy of this sensor is 10 mm and it works even underwater. Another important sensor is ultrasound, which is used to detect the smallest defects on the pipeline (accuracy of 0.001 mm) and will also detect the strength of the pipeline on the Brinell and Rockwell scale (HB, HRC). Furthermore, the robot will be equipped with GPS in a newer version – CPS (CommonPositionShift), accelerometer, gyrosensor, antenna and flow sensor.
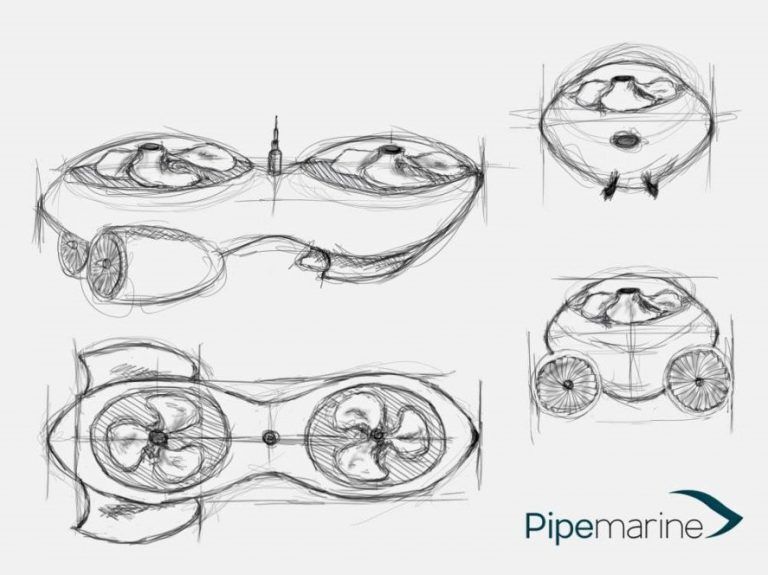
Functionality of Pipemarine
Propulsion will be provided by two electric motors with the ability to rotate in different directions for sideways, upward, downward and backward cruise, while the robot will be supplied with energy from an 80,000 mAh Li-Ion battery, which will be recharged by regenerative recharging using turbines built into the robot. The robot is expected to be manufactured using the commonly used SLS (SelectiveLaserSintering) 3D printing method using NYLON 11 material. This material provides the robot not only with good mechanical properties, but also with low density and a favourable price. The production cost of Pipemarine is approximately $2,000.